Intégrez votre robot dans les meilleures conditions:
Version : V2017
Etape 6: Charge embarquée
Qu´est-ce qu´une donnée de charge ?
De nos jours, les systèmes de robot travaillent avec plusieurs algorithmes et fonctions utilisant les données de charge actives (ex: Planification de trajectoire, régulation, surveillance, ...).
Les données de charge actives sont absolument nécessaires car elles agissent sur:
- L´interprétation des mouvements du robot
- La protection entre le robot et l´humain
- La précision
- Le temps de cycle
Les données de charge actives doivent être renseignées:
- à vide
- en charge
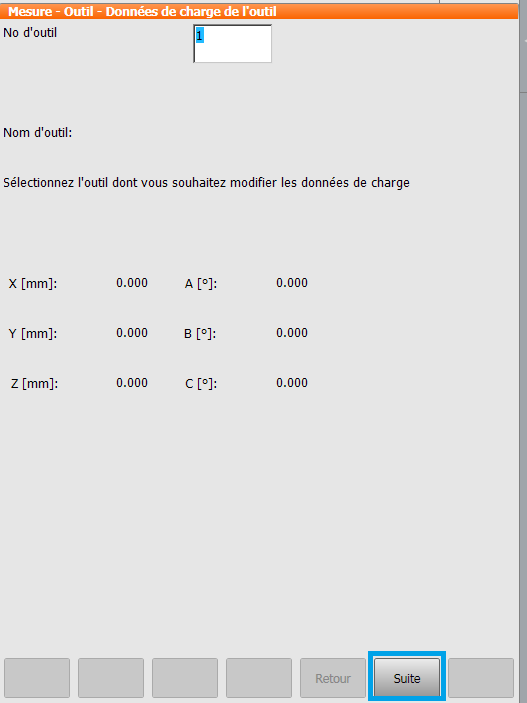
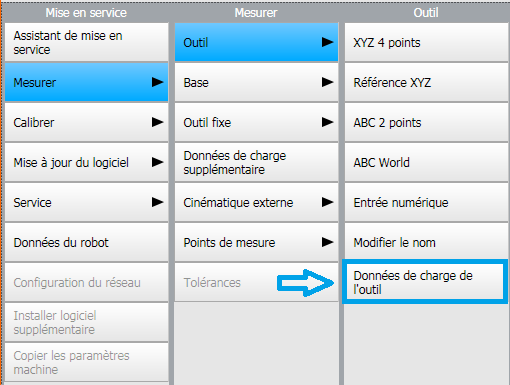
Comment renseigner les données de charge?
Allez dans le menu suivant du Smart-Pad afin de renseigner les données de charge de votre outil:
Les préjugés!
- Les données de charge ne sont actives que pour les mouvements PTP
 Faux!
Faux! - Le robot peut être utilisé avec les valeurs par défaut Faux!
Il est impératif de renseigner les données de charges dans le contrôleur!
De plus, les valeurs de armoire et d´inertie doivent être vérifiées avec KUKA Load.
- Les faisceaux A3 - A6 n´apportent aucune charge additionelle Faux!
Les données de charge doivent impérativement être correctement renseignées. Pour cela, dans la mesure du possible, un LDD est nécessaire.
Cela conditionne aussi la sécurité autour du robot du fait que le freinage est un freinage dynamique intimement lié aux données de charge.
Les étapes